Please tell us a little bit about yourself
I joined the School of Mechanical and Manufacturing Engineering, University of New South Wales, as a PhD student under the supervision of Dr Liao Wu and A/Prof Jay Katupitiya in September 2021. Prior to joining UNSW, I received my Master's degree in January 2021 for developing a humanoid robot that can switch between wheels and legs while walking. I later worked as a System Calibration and Development Engineer at KUKA Robotics, China and was awarded the Champion of Research and Development Innovation Challenge. In late 2021, I successfully secured a scholarship from the China Scholarship Council to pursue a PhD at UNSW.
Please tell us about your research
Robot-assisted surgery has become increasingly popular in the last two decades, providing better surgical outcomes to patients and improved ergonomics to surgeons. However, most surgical robotic instruments are still large in size and lack sensing capabilities, leaving long scars after surgery and causing occasional misoperations. In procedures like thyroid tumour removal, the limitations above may lead to prolonged recovery, cause patients distress, and affect their lives in the long term. Our project aims to develop a micro-size haptic sensor and integrate it into a minimally invasive robotic surgical system to address the mentioned challenges in diagnosis and treatment.
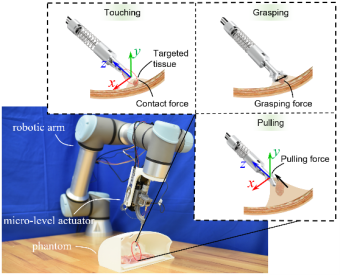
The project includes two parts: micro-size haptic sensor development and semi-autonomous strategy investigation. So far, we have done the first part, verified the proposed sensor’s feasibility through the ex-vivo robotic surgical procedure, and submitted a paper to IEEE Transactions on Robotics. The accompanying figure presents the current prototype, which shows that a pair of haptics-enabled forceps can realise automatic tissue manipulation, including touching, gasping, and pulling while measuring the corresponding forces.
What are the real-world applications of your research?
Our project aims to address the clinical challenges with the hope of generating more targeted treatment therapy, which is also one of Tyree IHealthE’s ambitions. Thyroid cancer is an apt example; it is increasing, and nearly four thousand new cases were diagnosed in Australia in 2021. Fortunately, 97% of patients can survive if they get sufficient treatment. However, the current treatment methods have the limitations mentioned above and may result in lifelong effects on patients.
Our proposed surgical robotic system, which is micro in size, multi-modal in tactile sensing, and intelligent in local motion control, can achieve an enhanced diagnosis and treatment of that kind of cancer without compromising a minimised incision and trauma.
What excites you about being part of the Bionics and Bio-robotics pillar at Tyree IHealthE?
My research fits well into the Bionics and Bio-robotics pillar. In previous research experience, I successfully solved critical problems for medical and healthcare applications and published achievements in IEEE conferences, letters, and transactions, which gave me great encouragement. I believe advanced bionics and bio-robotics can provide more advanced surgical solutions, and I was thrilled when I saw Tyree IHealthE launching the Bionics and Biorobotics pillar. Tyree IHealthE can provide access to world-class facilities and staff. It allows my project to align with the actual needs of clinics and patients and remain at the core of health technology solutions. With the support from the clinical facilities and the help of Tyree IHealthE, especially in experiments, my project will be significantly encouraged.
How do people get in touch with you?